AVR 컨트롤러 보드 설계 및 회로도

이 회로에서 중요하게 한가지 변한 것이 있다면 크리스탈이 있겠네요. UART통신을 할때에 보오레이트 주기를 설정하는데 그 때 크리스탈 값과 속도에 따라 에러율이 있는데요.
8Mhz 크리스탈의 경우 9600bps의 전송속도 사용시에 0.2%의 에러율이 있는데, 크게 문제없으나, BinGoon의 완벽 작품 몇가지를 만들기 위해서 7.3728Mhz 크리스탈을 사용해서 에러율을 0%로 맞췄습니다.
계속 포스팅 방식이 같지요. ㅎ 이제 아예 관련포스팅은 서식을 정해두고 포스팅 중이여서 그렇답니다.^
설계 된 회로는 적외선 제어했던 로봇이랑 동일 하구요. 블루투스 변환보드와 연결 할 수 있도록 RX, TX 통신단자에 핀헤더를 연결해서 UART 통신커넥터를 만들어두고, 블루투스 모듈에 전원을 공급 할수 있도록 따로 POWER단자도 만들어 두었습니다.
LightDrive만들 때 차체 앞에 LED를 달고 싶었는데 제가 I/O포트를 만들지 않아서 좀 아쉬운 부분이 있었는데 이번에는 혹시 LED나 다른 아이디어가 떠오를지 몰라서 포트D에 2,3 번핀을 핀헤더로 2핀 빼두어서 확장I/O포트도 만들었습니다.
제작중.... 사진

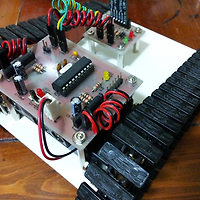
역시 에칭으로 제작했고, 이번에는 위쪽에 이름을 넣었습니다.
Designed By Beomsu 로, 다른거 만들때 계속 잊어버려서 못넣었는데 이번에는 생각이 났네요.

비교적 깔끔하게 만들어진 PCB상단부 입니다. 조금 마음에 안드는 오른쪽 부분도 있지만요..
그렇다고 완벽주의자 같은걸로 오해하시면 안됩니다. ㅎㅎ

PCB서포트까지 달아주면 완성!!!
이제 차체만 만들면 되겠네요.. 아카데미과학에서 나오는 스케일 탱크를 쓰고싶은데 돈 읎어서,
그냥 포맥스로나 만들어야 겠어요.... 탱크 하고싶은데....ㅜ 어쩔수 없죠.ㅎ
'AVR > AVR 작품, Project' 카테고리의 다른 글
| IT인 이라면 보안UP V-USB기반 HID장치 AVR 비밀번호 생성기 (AVR Password Generator) (22) | 2013.03.01 |
|---|---|
| [WblueBot 3/3] 탱크 차체 만들기 및 소프트웨어 프로그래밍 그리고 완성 (23) | 2013.02.12 |
| [WblueBot 1/3] 블루투스 TTL과 CMOS간 레벨변환 보드만들기, HC-06 블루투스 모듈설정 (2) | 2013.02.05 |
| [Light Drive 4/4] 적외선 무선제어 로봇완성 그리고 소프트웨어 프로그래밍 (66) | 2013.01.14 |
| [Light Drive 3/4] 포맥스로 적외선 무선제어 로봇 본체 프레임 제작 (8) | 2013.01.07 |